



About This Kernel
- What is the purpose of the study?
I am working on Deep Learning and Computer Vision in Flying Automobile Project. The project I am working on are Semantic segmentation (Aerial images) during the flight of the vehicle to find suitable areas where the vehicle can land. To make volumetric control of the vehicle to these areas.
With this kernel, I have completed working on the Semantic segmentation
- What is semantic segmentation
- Implementation of Segnet, FCN, UNet , PSPNet and other models in Keras
- I extracted Github codes
Source: https://divamgupta.com/image-segmentation/2019/06/06/deep-learning-semantic-segmentation-keras.html
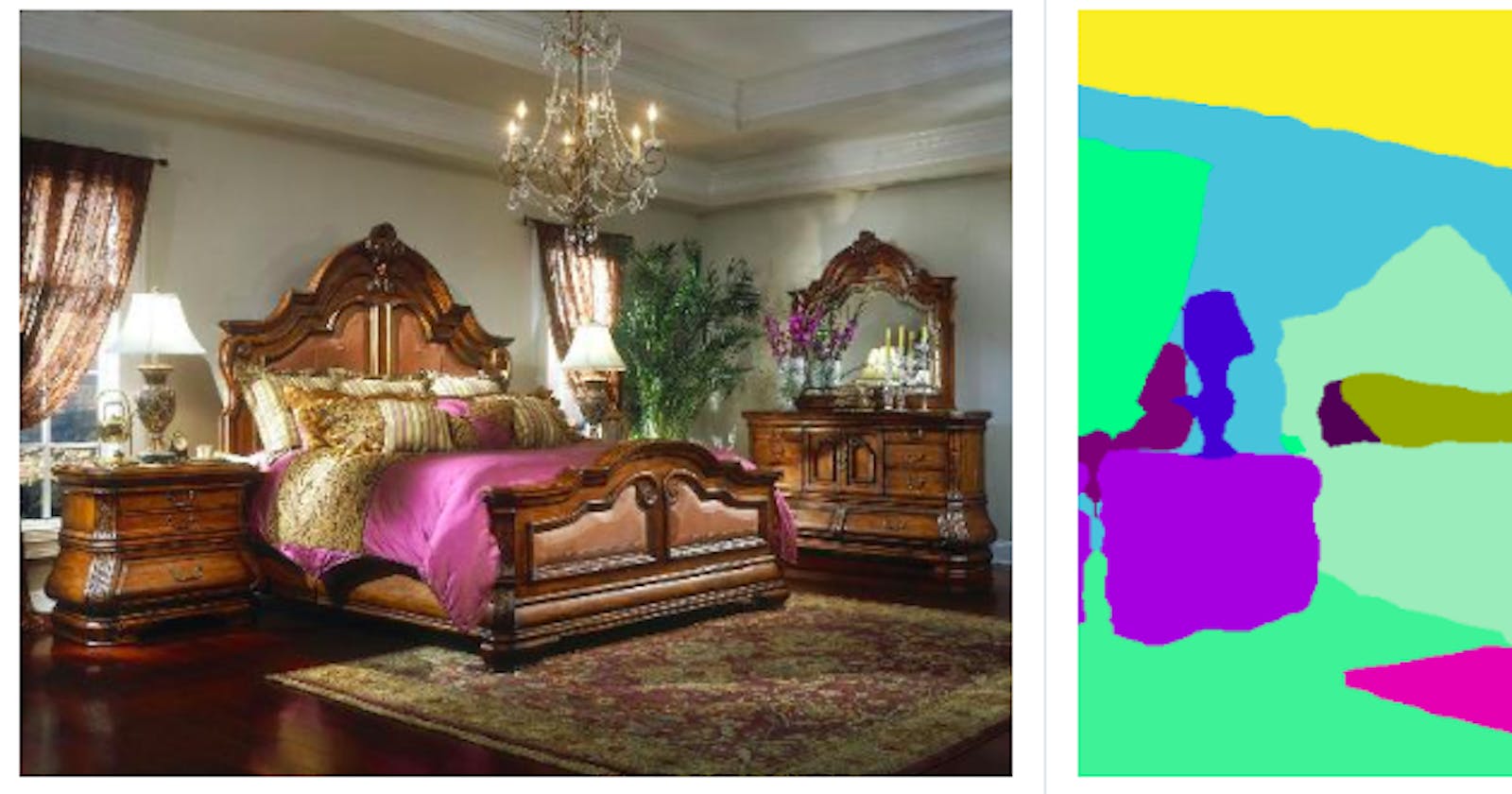
Semantic image segmentation is the task of classifying each pixel in an image from a predefined set of classes. In the following example, different entities are classified.

In the above example, the pixels belonging to the bed are classified in the class "bed", the pixels corresponding to the walls are labeled as "wall", etc.
In particular, our goal is to take an image of size W x H x 3 and generate a W x H matrix containing the predicted class ID's corresponding to all the pixels.
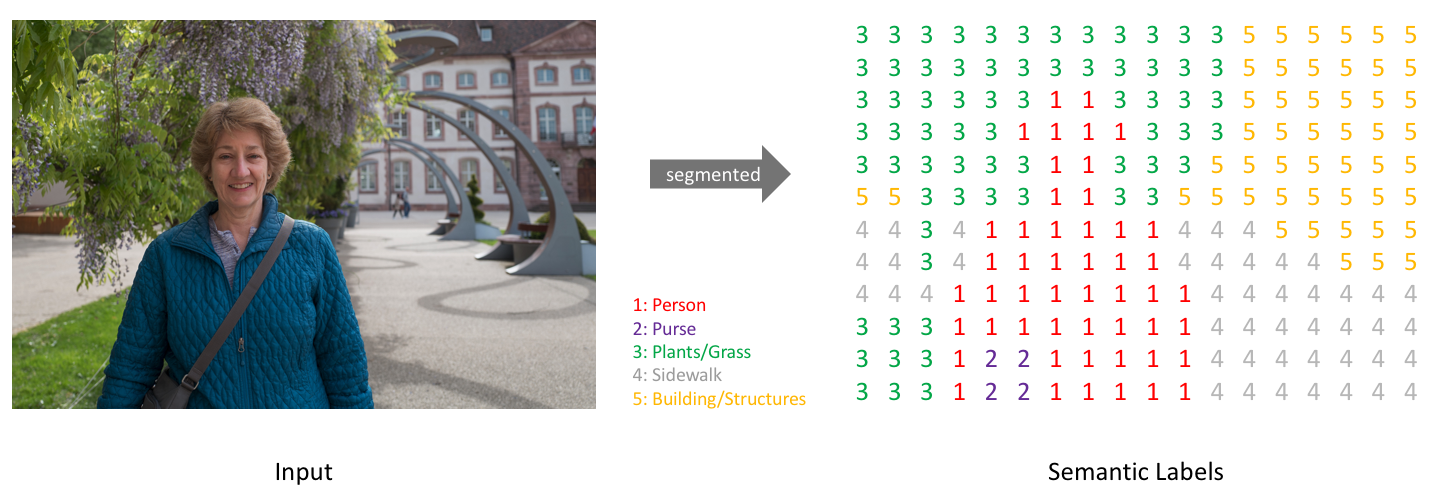
Usually, in an image with various entities, we want to know which pixel belongs to which entity, For example in an outdoor image, we can segment the sky, ground, trees, people, etc.
Semantic segmentation is different from object detection as it does not predict any bounding boxes around the objects. We do not distinguish between different instances of the same object. For example, there could be multiple cars in the scene and all of them would have the same label.

In order to perform semantic segmentation, a higher level understanding of the image is required. The algorithm should figure out the objects present and also the pixels which correspond to the object. Semantic segmentation is one of the essential tasks for complete scene understanding.
Dataset
The first step in training our segmentation model is to prepare the dataset. We would need the input RGB images and the corresponding segmentation images. If you want to make your own dataset, a tool like labelme or GIMP can be used to manually generate the ground truth segmentation masks.
Assign each class a unique ID. In the segmentation images, the pixel value should denote the class ID of the corresponding pixel. This is a common format used by most of the datasets and keras_segmentation. For the segmentation maps, do not use the jpg format as jpg is lossy and the pixel values might change. Use bmp or png format instead. And of course, the size of the input image and the segmentation image should be the same.
In the following example, pixel (0,0) is labeled as class 2, pixel (3,4) is labeled as class 1 and rest of the pixels are labeled as class 0.
In [1]:
import cv2 import numpy as np ann_img = np.zeros((30,30,3)).astype('uint8') ann_img[ 3 , 4 ] = 1 # this would set the label of pixel 3,4 as 1 ann_img[ 0 , 0 ] = 2 # this would set the label of pixel 0,0 as 2
After generating the segmentation images, place them in the training/testing folder. Make separate folders for input images and the segmentation images. The file name of the input image and the corresponding segmentation image should be the same. For this tutorial we would be using a data-set which is already prepared. You can download it from here (Aerial Semantic Segmentation Drone Dataset).
Aerial Semantic Segmentation Drone Dataset
In [2]:
from PIL import Image import matplotlib.pyplot as plt %matplotlib inline original_image = "/kaggle/input/semantic-drone-dataset/dataset/semantic_drone_dataset/original_images/001.jpg" label_image_semantic = "/kaggle/input/semantic-drone-dataset/dataset/semantic_drone_dataset/label_images_semantic/001.png" fig, axs = plt.subplots(1, 2, figsize=(16, 8), constrained_layout=True) axs[0].imshow( Image.open(original_image)) axs[0].grid(False) label_image_semantic = Image.open(label_image_semantic) label_image_semantic = np.asarray(label_image_semantic) axs[1].imshow(label_image_semantic) axs[1].grid(False)

Source Github Link: https://github.com/divamgupta/image-segmentation-keras
Output
In [3]:
!pip install keras-segmentation
Train
In [4]:
kaggle_commit = True epochs = 20 if kaggle_commit: epochs = 5
In [5]:
from keras_segmentation.models.unet import vgg_unet n_classes = 23 # Aerial Semantic Segmentation Drone Dataset tree, gras, other vegetation, dirt, gravel, rocks, water, paved area, pool, person, dog, car, bicycle, roof, wall, fence, fence-pole, window, door, obstacle model = vgg_unet(n_classes=n_classes , input_height=416, input_width=608 ) model.train( train_images = "/kaggle/input/semantic-drone-dataset/dataset/semantic_drone_dataset/original_images/", train_annotations = "/kaggle/input/semantic-drone-dataset/dataset/semantic_drone_dataset/label_images_semantic/", checkpoints_path = "vgg_unet" , epochs=epochs )
Train
In [4]:
kaggle_commit = True epochs = 20 if kaggle_commit: epochs = 5
In [5]:
from keras_segmentation.models.unet import vgg_unet n_classes = 23 # Aerial Semantic Segmentation Drone Dataset tree, gras, other vegetation, dirt, gravel, rocks, water, paved area, pool, person, dog, car, bicycle, roof, wall, fence, fence-pole, window, door, obstacle model = vgg_unet(n_classes=n_classes , input_height=416, input_width=608 ) model.train( train_images = "/kaggle/input/semantic-drone-dataset/dataset/semantic_drone_dataset/original_images/", train_annotations = "/kaggle/input/semantic-drone-dataset/dataset/semantic_drone_dataset/label_images_semantic/", checkpoints_path = "vgg_unet" , epochs=epochs )
Using TensorFlow backend.
Downloading data from https://github.com/fchollet/deep-learning-models/releases/download/v0.1/vgg16_weights_tf_dim_ordering_tf_kernels_notop.h5 58892288/58889256 [==============================] - 5s 0us/step
0%| | 0/400 [00:00<?, ?it/s]
Verifying training dataset
100%|██████████| 400/400 [05:23<00:00, 1.24it/s]
Dataset verified! Epoch 1/5 512/512 [==============================] - 693s 1s/step - loss: 1.4858 - accuracy: 0.5910 saved vgg_unet.0 Epoch 2/5 512/512 [==============================] - 690s 1s/step - loss: 1.1745 - accuracy: 0.6474 saved vgg_unet.1 Epoch 3/5 512/512 [==============================] - 689s 1s/step - loss: 1.0604 - accuracy: 0.6776 saved vgg_unet.2 Epoch 4/5 512/512 [==============================] - 692s 1s/step - loss: 0.9800 - accuracy: 0.7042 saved vgg_unet.3 Epoch 5/5 512/512 [==============================] - 692s 1s/step - loss: 0.9144 - accuracy: 0.7254 saved vgg_unet.4
Prediction
In [6]:
import time from PIL import Image import matplotlib.pyplot as plt %matplotlib inline start = time.time() input_image = "/kaggle/input/semantic-drone-dataset/dataset/semantic_drone_dataset/original_images/001.jpg" out = model.predict_segmentation( inp=input_image, out_fname="out.png" ) fig, axs = plt.subplots(1, 3, figsize=(20, 20), constrained_layout=True) img_orig = Image.open(input_image) axs[0].imshow(img_orig) axs[0].set_title('original image-001.jpg') axs[0].grid(False) axs[1].imshow(out) axs[1].set_title('prediction image-out.png') axs[1].grid(False) validation_image = "/kaggle/input/semantic-drone-dataset/dataset/semantic_drone_dataset/label_images_semantic/001.png" axs[2].imshow( Image.open(validation_image)) axs[2].set_title('true label image-001.png') axs[2].grid(False) done = time.time() elapsed = done - start

In [7]:
print(elapsed) print(out) print(out.shape)
3.0578877925872803 [[0 1 0 ... 0 3 0] [0 1 1 ... 3 3 3] [0 1 1 ... 3 3 3] ... [0 1 1 ... 3 3 3] [0 1 1 ... 3 3 3] [0 1 1 ... 3 3 3]] (208, 304)
Implementation of Segnet, FCN, UNet , PSPNet and other models in Keras the codes in this section do everything for you. You have no chance to interfere with the codes. I extracted these codes and wrote them open and open. We will have the chance to trade on the model as we wish.
In [8]:
import os os.environ['TF_CPP_MIN_LOG_LEVEL'] = '3' import keras from keras.models import * from keras.layers import * from types import MethodType import random import six import json from tqdm import tqdm import cv2 import numpy as np import itertools
In [9]:
import sys print(sys.version)
3.6.6 |Anaconda, Inc.| (default, Oct 9 2018, 12:34:16) [GCC 7.3.0]
In [10]:
IMAGE_ORDERING_CHANNELS_FIRST = "channels_first" IMAGE_ORDERING_CHANNELS_LAST = "channels_last" # Default IMAGE_ORDERING = channels_last IMAGE_ORDERING = IMAGE_ORDERING_CHANNELS_LAST if IMAGE_ORDERING == 'channels_first': MERGE_AXIS = 1 elif IMAGE_ORDERING == 'channels_last': MERGE_AXIS = -1 if IMAGE_ORDERING == 'channels_first': pretrained_url = "https://github.com/fchollet/deep-learning-models/" \ "releases/download/v0.1/" \ "vgg16_weights_th_dim_ordering_th_kernels_notop.h5" elif IMAGE_ORDERING == 'channels_last': pretrained_url = "https://github.com/fchollet/deep-learning-models/" \ "releases/download/v0.1/" \ "vgg16_weights_tf_dim_ordering_tf_kernels_notop.h5" class_colors = [(random.randint(0, 255), random.randint( 0, 255), random.randint(0, 255)) for _ in range(5000)]
In [11]:
def get_colored_segmentation_image( seg_arr , n_classes , colors=class_colors ): output_height = seg_arr.shape[0] output_width = seg_arr.shape[1] seg_img = np.zeros((output_height, output_width, 3)) for c in range(n_classes): seg_img[:, :, 0] += ((seg_arr[:, :] == c)*(colors[c][0])).astype('uint8') seg_img[:, :, 1] += ((seg_arr[:, :] == c)*(colors[c][1])).astype('uint8') seg_img[:, :, 2] += ((seg_arr[:, :] == c)*(colors[c][2])).astype('uint8') return seg_img
In [12]:
def visualize_segmentation( seg_arr , inp_img=None , n_classes=None , colors=class_colors , class_names=None , overlay_img=False , show_legends=False , prediction_width=None , prediction_height=None ): if n_classes is None: n_classes = np.max(seg_arr) seg_img = get_colored_segmentation_image( seg_arr , n_classes , colors=colors ) if not inp_img is None: orininal_h = inp_img.shape[0] orininal_w = inp_img.shape[1] seg_img = cv2.resize(seg_img, (orininal_w, orininal_h)) if (not prediction_height is None) and (not prediction_width is None): seg_img = cv2.resize(seg_img, (prediction_width, prediction_height )) if not inp_img is None: inp_img = cv2.resize(inp_img, (prediction_width, prediction_height )) if overlay_img: assert not inp_img is None seg_img = overlay_seg_image( inp_img , seg_img ) if show_legends: assert not class_names is None legend_img = get_legends(class_names , colors=colors ) seg_img = concat_lenends( seg_img , legend_img ) return seg_img
In [13]:
def get_image_array(image_input, width, height, imgNorm="sub_mean", ordering='channels_first'): """ Load image array from input """ if type(image_input) is np.ndarray: # It is already an array, use it as it is img = image_input elif isinstance(image_input, six.string_types) : if not os.path.isfile(image_input): raise DataLoaderError("get_image_array: path {0} doesn't exist".format(image_input)) img = cv2.imread(image_input, 1) else: raise DataLoaderError("get_image_array: Can't process input type {0}".format(str(type(image_input)))) if imgNorm == "sub_and_divide": img = np.float32(cv2.resize(img, (width, height))) / 127.5 - 1 elif imgNorm == "sub_mean": img = cv2.resize(img, (width, height)) img = img.astype(np.float32) img[:, :, 0] -= 103.939 img[:, :, 1] -= 116.779 img[:, :, 2] -= 123.68 img = img[:, :, ::-1] elif imgNorm == "divide": img = cv2.resize(img, (width, height)) img = img.astype(np.float32) img = img/255.0 if ordering == 'channels_first': img = np.rollaxis(img, 2, 0) return img def get_image_arr( path , width , height , imgNorm="sub_mean" , odering='channels_first' ): if type( path ) is np.ndarray: img = path else: img = cv2.imread(path, 1) if imgNorm == "sub_and_divide": img = np.float32(cv2.resize(img, ( width , height ))) / 127.5 - 1 elif imgNorm == "sub_mean": img = cv2.resize(img, ( width , height )) img = img.astype(np.float32) img[:,:,0] -= 103.939 img[:,:,1] -= 116.779 img[:,:,2] -= 123.68 img = img[ : , : , ::-1 ] elif imgNorm == "divide": img = cv2.resize(img, ( width , height )) img = img.astype(np.float32) img = img/255.0 if odering == 'channels_first': img = np.rollaxis(img, 2, 0) return img def get_segmentation_array(image_input, nClasses, width, height, no_reshape=False): """ Load segmentation array from input """ seg_labels = np.zeros((height, width, nClasses)) if type(image_input) is np.ndarray: # It is already an array, use it as it is img = image_input elif isinstance(image_input, six.string_types) : if not os.path.isfile(image_input): raise DataLoaderError("get_segmentation_array: path {0} doesn't exist".format(image_input)) img = cv2.imread(image_input, 1) else: raise DataLoaderError("get_segmentation_array: Can't process input type {0}".format(str(type(image_input)))) img = cv2.resize(img, (width, height), interpolation=cv2.INTER_NEAREST) img = img[:, :, 0] for c in range(nClasses): seg_labels[:, :, c] = (img == c).astype(int) if not no_reshape: seg_labels = np.reshape(seg_labels, (width*height, nClasses)) return seg_labels
In [14]:
def image_segmentation_generator(images_path, segs_path, batch_size, n_classes, input_height, input_width, output_height, output_width, do_augment=False ,augmentation_name="aug_all" ): img_seg_pairs = get_pairs_from_paths(images_path, segs_path) random.shuffle(img_seg_pairs) zipped = itertools.cycle(img_seg_pairs) while True: X = [] Y = [] for _ in range(batch_size): im, seg = next(zipped) im = cv2.imread(im, 1) seg = cv2.imread(seg, 1) if do_augment: im, seg[:, :, 0] = augment_seg(im, seg[:, :, 0] , augmentation_name=augmentation_name ) X.append(get_image_array(im, input_width, input_height, ordering=IMAGE_ORDERING)) Y.append(get_segmentation_array( seg, n_classes, output_width, output_height)) yield np.array(X), np.array(Y)
In [15]:
def get_pairs_from_paths(images_path, segs_path, ignore_non_matching=False): """ Find all the images from the images_path directory and the segmentation images from the segs_path directory while checking integrity of data """ ACCEPTABLE_IMAGE_FORMATS = [".jpg", ".jpeg", ".png" , ".bmp"] ACCEPTABLE_SEGMENTATION_FORMATS = [".png", ".bmp"] image_files = [] segmentation_files = {} for dir_entry in os.listdir(images_path): if os.path.isfile(os.path.join(images_path, dir_entry)) and \ os.path.splitext(dir_entry)[1] in ACCEPTABLE_IMAGE_FORMATS: file_name, file_extension = os.path.splitext(dir_entry) image_files.append((file_name, file_extension, os.path.join(images_path, dir_entry))) for dir_entry in os.listdir(segs_path): if os.path.isfile(os.path.join(segs_path, dir_entry)) and \ os.path.splitext(dir_entry)[1] in ACCEPTABLE_SEGMENTATION_FORMATS: file_name, file_extension = os.path.splitext(dir_entry) if file_name in segmentation_files: raise DataLoaderError("Segmentation file with filename {0} already exists and is ambiguous to resolve with path {1}. Please remove or rename the latter.".format(file_name, os.path.join(segs_path, dir_entry))) segmentation_files[file_name] = (file_extension, os.path.join(segs_path, dir_entry)) return_value = [] # Match the images and segmentations for image_file, _, image_full_path in image_files: if image_file in segmentation_files: return_value.append((image_full_path, segmentation_files[image_file][1])) elif ignore_non_matching: continue else: # Error out raise DataLoaderError("No corresponding segmentation found for image {0}.".format(image_full_path)) return return_value
In [16]:
def verify_segmentation_dataset(images_path, segs_path, n_classes, show_all_errors=False): try: img_seg_pairs = get_pairs_from_paths(images_path, segs_path) if not len(img_seg_pairs): print("Couldn't load any data from images_path: {0} and segmentations path: {1}".format(images_path, segs_path)) return False return_value = True for im_fn, seg_fn in tqdm(img_seg_pairs): img = cv2.imread(im_fn) seg = cv2.imread(seg_fn) # Check dimensions match if not img.shape == seg.shape: return_value = False print("The size of image {0} and its segmentation {1} doesn't match (possibly the files are corrupt).".format(im_fn, seg_fn)) if not show_all_errors: break else: max_pixel_value = np.max(seg[:, :, 0]) if max_pixel_value >= n_classes: return_value = False print("The pixel values of the segmentation image {0} violating range [0, {1}]. Found maximum pixel value {2}".format(seg_fn, str(n_classes - 1), max_pixel_value)) if not show_all_errors: break if return_value: print("Dataset verified! ") else: print("Dataset not verified!") return return_value except Exception as e: print("Found error during data loading\n{0}".format(str(e))) return False
In [17]:
def evaluate( model=None , inp_images=None , annotations=None,inp_images_dir=None ,annotations_dir=None , checkpoints_path=None ): if model is None: assert (checkpoints_path is not None) , "Please provide the model or the checkpoints_path" model = model_from_checkpoint_path(checkpoints_path) if inp_images is None: assert (inp_images_dir is not None) , "Please privide inp_images or inp_images_dir" assert (annotations_dir is not None) , "Please privide inp_images or inp_images_dir" paths = get_pairs_from_paths(inp_images_dir , annotations_dir ) paths = list(zip(*paths)) inp_images = list(paths[0]) annotations = list(paths[1]) assert type(inp_images) is list assert type(annotations) is list tp = np.zeros( model.n_classes ) fp = np.zeros( model.n_classes ) fn = np.zeros( model.n_classes ) n_pixels = np.zeros( model.n_classes ) for inp , ann in tqdm( zip( inp_images , annotations )): pr = predict(model , inp ) gt = get_segmentation_array( ann , model.n_classes , model.output_width , model.output_height , no_reshape=True ) gt = gt.argmax(-1) pr = pr.flatten() gt = gt.flatten() for cl_i in range(model.n_classes ): tp[ cl_i ] += np.sum( (pr == cl_i) * (gt == cl_i) ) fp[ cl_i ] += np.sum( (pr == cl_i) * ((gt != cl_i)) ) fn[ cl_i ] += np.sum( (pr != cl_i) * ((gt == cl_i)) ) n_pixels[ cl_i ] += np.sum( gt == cl_i ) cl_wise_score = tp / ( tp + fp + fn + 0.000000000001 ) n_pixels_norm = n_pixels / np.sum(n_pixels) frequency_weighted_IU = np.sum(cl_wise_score*n_pixels_norm) mean_IU = np.mean(cl_wise_score) return {"frequency_weighted_IU":frequency_weighted_IU , "mean_IU":mean_IU , "class_wise_IU":cl_wise_score }
In [18]:
def predict_multiple(model=None, inps=None, inp_dir=None, out_dir=None, checkpoints_path=None ,overlay_img=False , class_names=None , show_legends=False , colors=class_colors , prediction_width=None , prediction_height=None ): if model is None and (checkpoints_path is not None): model = model_from_checkpoint_path(checkpoints_path) if inps is None and (inp_dir is not None): inps = glob.glob(os.path.join(inp_dir, "*.jpg")) + glob.glob( os.path.join(inp_dir, "*.png")) + \ glob.glob(os.path.join(inp_dir, "*.jpeg")) assert type(inps) is list all_prs = [] for i, inp in enumerate(tqdm(inps)): if out_dir is None: out_fname = None else: if isinstance(inp, six.string_types): out_fname = os.path.join(out_dir, os.path.basename(inp)) else: out_fname = os.path.join(out_dir, str(i) + ".jpg") pr = predict( model, inp, out_fname , overlay_img=overlay_img,class_names=class_names ,show_legends=show_legends , colors=colors , prediction_width=prediction_width , prediction_height=prediction_height ) all_prs.append(pr) return all_prs
In [19]:
def predict(model=None, inp=None, out_fname=None, checkpoints_path=None,overlay_img=False , class_names=None , show_legends=False , colors=class_colors , prediction_width=None , prediction_height=None ): if model is None and (checkpoints_path is not None): model = model_from_checkpoint_path(checkpoints_path) assert (inp is not None) assert((type(inp) is np.ndarray) or isinstance(inp, six.string_types) ), "Inupt should be the CV image or the input file name" if isinstance(inp, six.string_types): inp = cv2.imread(inp) assert len(inp.shape) == 3, "Image should be h,w,3 " orininal_h = inp.shape[0] orininal_w = inp.shape[1] output_width = model.output_width output_height = model.output_height input_width = model.input_width input_height = model.input_height n_classes = model.n_classes x = get_image_array(inp, input_width, input_height, ordering=IMAGE_ORDERING) pr = model.predict(np.array([x]))[0] pr = pr.reshape((output_height, output_width, n_classes)).argmax(axis=2) seg_img = visualize_segmentation( pr , inp ,n_classes=n_classes , colors=colors , overlay_img=overlay_img ,show_legends=show_legends ,class_names=class_names ,prediction_width=prediction_width , prediction_height=prediction_height ) if out_fname is not None: cv2.imwrite(out_fname, seg_img) return pr
In [20]:
def train(model, train_images, train_annotations, input_height=None, input_width=None, n_classes=None, verify_dataset=True, checkpoints_path=None, epochs=5, batch_size=2, validate=False, val_images=None, val_annotations=None, val_batch_size=2, auto_resume_checkpoint=False, load_weights=None, steps_per_epoch=512, val_steps_per_epoch=512, gen_use_multiprocessing=False, ignore_zero_class=False , optimizer_name='adadelta' , do_augment=False , augmentation_name="aug_all" ): # check if user gives model name instead of the model object if isinstance(model, six.string_types): # create the model from the name assert (n_classes is not None), "Please provide the n_classes" if (input_height is not None) and (input_width is not None): model = model_from_name[model]( n_classes, input_height=input_height, input_width=input_width) else: model = model_from_name[model](n_classes) n_classes = model.n_classes input_height = model.input_height input_width = model.input_width output_height = model.output_height output_width = model.output_width if validate: assert val_images is not None assert val_annotations is not None if optimizer_name is not None: if ignore_zero_class: loss_k = masked_categorical_crossentropy else: loss_k = 'categorical_crossentropy' model.compile(loss= loss_k , optimizer=optimizer_name, metrics=['accuracy']) if checkpoints_path is not None: with open(checkpoints_path+"_config.json", "w") as f: json.dump({ "model_class": model.model_name, "n_classes": n_classes, "input_height": input_height, "input_width": input_width, "output_height": output_height, "output_width": output_width }, f) if load_weights is not None and len(load_weights) > 0: print("Loading weights from ", load_weights) model.load_weights(load_weights) if auto_resume_checkpoint and (checkpoints_path is not None): latest_checkpoint = find_latest_checkpoint(checkpoints_path) if latest_checkpoint is not None: print("Loading the weights from latest checkpoint ", latest_checkpoint) model.load_weights(latest_checkpoint) if verify_dataset: print("Verifying training dataset") verified = verify_segmentation_dataset(train_images, train_annotations, n_classes) assert verified if validate: print("Verifying validation dataset") verified = verify_segmentation_dataset(val_images, val_annotations, n_classes) assert verified train_gen = image_segmentation_generator( train_images, train_annotations, batch_size, n_classes, input_height, input_width, output_height, output_width , do_augment=do_augment ,augmentation_name=augmentation_name ) if validate: val_gen = image_segmentation_generator( val_images, val_annotations, val_batch_size, n_classes, input_height, input_width, output_height, output_width) if not validate: for ep in range(epochs): print("Starting Epoch ", ep) model.fit_generator(train_gen, steps_per_epoch, epochs=1, use_multiprocessing=True) if checkpoints_path is not None: model.save_weights(checkpoints_path + "." + str(ep)) print("saved ", checkpoints_path + ".model." + str(ep)) print("Finished Epoch", ep) else: for ep in range(epochs): print("Starting Epoch ", ep) model.fit_generator(train_gen, steps_per_epoch, validation_data=val_gen, validation_steps=val_steps_per_epoch, epochs=1 , use_multiprocessing=gen_use_multiprocessing) if checkpoints_path is not None: model.save_weights(checkpoints_path + "." + str(ep)) print("saved ", checkpoints_path + ".model." + str(ep)) print("Finished Epoch", ep)
In [21]:
def get_segmentation_model(input, output): img_input = input o = output o_shape = Model(img_input, o).output_shape i_shape = Model(img_input, o).input_shape if IMAGE_ORDERING == 'channels_first': output_height = o_shape[2] output_width = o_shape[3] input_height = i_shape[2] input_width = i_shape[3] n_classes = o_shape[1] o = (Reshape((-1, output_height*output_width)))(o) o = (Permute((2, 1)))(o) elif IMAGE_ORDERING == 'channels_last': output_height = o_shape[1] output_width = o_shape[2] input_height = i_shape[1] input_width = i_shape[2] n_classes = o_shape[3] o = (Reshape((output_height*output_width, -1)))(o) o = (Activation('softmax'))(o) model = Model(img_input, o) model.output_width = output_width model.output_height = output_height model.n_classes = n_classes model.input_height = input_height model.input_width = input_width model.model_name = "" model.train = MethodType(train, model) model.predict_segmentation = MethodType(predict, model) model.predict_multiple = MethodType(predict_multiple, model) model.evaluate_segmentation = MethodType(evaluate, model) return model
In [22]:
def get_vgg_encoder(input_height=224, input_width=224, pretrained='imagenet'): assert input_height % 32 == 0 assert input_width % 32 == 0 if IMAGE_ORDERING == 'channels_first': img_input = Input(shape=(3, input_height, input_width)) elif IMAGE_ORDERING == 'channels_last': img_input = Input(shape=(input_height, input_width, 3)) x = Conv2D(64, (3, 3), activation='relu', padding='same', name='block1_conv1', data_format=IMAGE_ORDERING)(img_input) x = Conv2D(64, (3, 3), activation='relu', padding='same', name='block1_conv2', data_format=IMAGE_ORDERING)(x) x = MaxPooling2D((2, 2), strides=(2, 2), name='block1_pool', data_format=IMAGE_ORDERING)(x) f1 = x # Block 2 x = Conv2D(128, (3, 3), activation='relu', padding='same', name='block2_conv1', data_format=IMAGE_ORDERING)(x) x = Conv2D(128, (3, 3), activation='relu', padding='same', name='block2_conv2', data_format=IMAGE_ORDERING)(x) x = MaxPooling2D((2, 2), strides=(2, 2), name='block2_pool', data_format=IMAGE_ORDERING)(x) f2 = x # Block 3 x = Conv2D(256, (3, 3), activation='relu', padding='same', name='block3_conv1', data_format=IMAGE_ORDERING)(x) x = Conv2D(256, (3, 3), activation='relu', padding='same', name='block3_conv2', data_format=IMAGE_ORDERING)(x) x = Conv2D(256, (3, 3), activation='relu', padding='same', name='block3_conv3', data_format=IMAGE_ORDERING)(x) x = MaxPooling2D((2, 2), strides=(2, 2), name='block3_pool', data_format=IMAGE_ORDERING)(x) f3 = x # Block 4 x = Conv2D(512, (3, 3), activation='relu', padding='same', name='block4_conv1', data_format=IMAGE_ORDERING)(x) x = Conv2D(512, (3, 3), activation='relu', padding='same', name='block4_conv2', data_format=IMAGE_ORDERING)(x) x = Conv2D(512, (3, 3), activation='relu', padding='same', name='block4_conv3', data_format=IMAGE_ORDERING)(x) x = MaxPooling2D((2, 2), strides=(2, 2), name='block4_pool', data_format=IMAGE_ORDERING)(x) f4 = x # Block 5 x = Conv2D(512, (3, 3), activation='relu', padding='same', name='block5_conv1', data_format=IMAGE_ORDERING)(x) x = Conv2D(512, (3, 3), activation='relu', padding='same', name='block5_conv2', data_format=IMAGE_ORDERING)(x) x = Conv2D(512, (3, 3), activation='relu', padding='same', name='block5_conv3', data_format=IMAGE_ORDERING)(x) x = MaxPooling2D((2, 2), strides=(2, 2), name='block5_pool', data_format=IMAGE_ORDERING)(x) f5 = x if pretrained == 'imagenet': VGG_Weights_path = keras.utils.get_file(pretrained_url.split("/")[-1], pretrained_url) Model(img_input, x).load_weights(VGG_Weights_path) return img_input, [f1, f2, f3, f4, f5]
In [23]:
def _unet(n_classes, encoder, l1_skip_conn=True, input_height=416, input_width=608): img_input, levels = encoder( input_height=input_height, input_width=input_width) [f1, f2, f3, f4, f5] = levels o = f4 o = (ZeroPadding2D((1, 1), data_format=IMAGE_ORDERING))(o) o = (Conv2D(512, (3, 3), padding='valid', data_format=IMAGE_ORDERING))(o) o = (BatchNormalization())(o) o = (UpSampling2D((2, 2), data_format=IMAGE_ORDERING))(o) o = (concatenate([o, f3], axis=MERGE_AXIS)) o = (ZeroPadding2D((1, 1), data_format=IMAGE_ORDERING))(o) o = (Conv2D(256, (3, 3), padding='valid', data_format=IMAGE_ORDERING))(o) o = (BatchNormalization())(o) o = (UpSampling2D((2, 2), data_format=IMAGE_ORDERING))(o) o = (concatenate([o, f2], axis=MERGE_AXIS)) o = (ZeroPadding2D((1, 1), data_format=IMAGE_ORDERING))(o) o = (Conv2D(128, (3, 3), padding='valid', data_format=IMAGE_ORDERING))(o) o = (BatchNormalization())(o) o = (UpSampling2D((2, 2), data_format=IMAGE_ORDERING))(o) if l1_skip_conn: o = (concatenate([o, f1], axis=MERGE_AXIS)) o = (ZeroPadding2D((1, 1), data_format=IMAGE_ORDERING))(o) o = (Conv2D(64, (3, 3), padding='valid', data_format=IMAGE_ORDERING))(o) o = (BatchNormalization())(o) o = Conv2D(n_classes, (3, 3), padding='same',data_format=IMAGE_ORDERING)(o) model = get_segmentation_model(img_input, o) return model
In [24]:
def vgg_unet(n_classes, input_height=416, input_width=608, encoder_level=3): model = _unet(n_classes, get_vgg_encoder,input_height=input_height, input_width=input_width) model.model_name = "vgg_unet" return model n_classes = 23 # Aerial Semantic Segmentation Drone Dataset tree, gras, other vegetation, dirt, gravel, rocks, water, paved area, pool, person, dog, car, bicycle, roof, wall, fence, fence-pole, window, door, obstacle model = vgg_unet(n_classes=n_classes, input_height=416, input_width=608) model_from_name = {} model_from_name["vgg_unet"] = vgg_unet
Train
In [25]:
kaggle_commit = True epochs = 20 if kaggle_commit: epochs = 5
In [26]:
model.train( train_images = "/kaggle/input/semantic-drone-dataset/dataset/semantic_drone_dataset/original_images/", train_annotations = "/kaggle/input/semantic-drone-dataset/dataset/semantic_drone_dataset/label_images_semantic/", checkpoints_path = "vgg_unet" , epochs=epochs )
0%| | 0/400 [00:00<?, ?it/s]
Verifying training dataset
100%|██████████| 400/400 [04:14<00:00, 1.57it/s]
Dataset verified! Starting Epoch 0 Epoch 1/1 512/512 [==============================] - 751s 1s/step - loss: 1.5045 - accuracy: 0.5869 saved vgg_unet.model.0 Finished Epoch 0 Starting Epoch 1 Epoch 1/1 512/512 [==============================] - 756s 1s/step - loss: 1.1737 - accuracy: 0.6511 saved vgg_unet.model.1 Finished Epoch 1 Starting Epoch 2 Epoch 1/1 512/512 [==============================] - 730s 1s/step - loss: 1.0721 - accuracy: 0.6765 saved vgg_unet.model.2 Finished Epoch 2 Starting Epoch 3 Epoch 1/1 512/512 [==============================] - 759s 1s/step - loss: 1.0045 - accuracy: 0.6981 saved vgg_unet.model.3 Finished Epoch 3 Starting Epoch 4 Epoch 1/1 512/512 [==============================] - 759s 1s/step - loss: 0.9506 - accuracy: 0.7152 saved vgg_unet.model.4 Finished Epoch 4